
Lincoln Laboratory technology generates flight paths with agentic AI
The use of drones for both civilian and military applications is steadily growing, and as these operations become increasingly complex, the mission planning process must evolve to ensure efficiency and scalability. To improve drone mission planning, the Laboratory began the Automated Strategic Compliance and Engineering for Needs-driven Design (ASCEND) project. The project has since grown from its origins as an internally funded program and is being transitioned to external sponsors including the Federal Aviation Administration (FAA) and the Office of the Under Secretary of War (OUSW).
There are three steps to planning drone missions: retrieve, reason, and generate. A flight planner retrieves logistical information about the space the drone will fly through, such as weather, locations of adversaries, and no-fly zones. Once sufficient information is gathered, it is then reasoned, or weighed, against the goals and constraints of the mission to determine the most relevant factors. Finally, a route is generated based on the identified key information.
Currently, a trained expert is tasked with mission planning and is in charge of making every decision involved with developing a flight plan. As drone operations scale up, experts could be required to plan hundreds or even thousands of missions, making it increasingly challenging and less efficient for them to design each flight plan and recall what information was used for each route. To overcome these issues, the ASCEND project turned to AI solutions, eventually landing on agentic AI.
"The original vision for the project was to create a drone mission planner for search and rescue operations that can abide by regional regulations," said Daniel Stabile, an associate staff member in the Homeland Protection Systems Group. "At the time, they were interested in what's called retrieval augmented generation (RAG). The way this works is you have a large language model (LLM) that can generate a response, but by using RAG, we can first augment the response by retrieving information from some external source. That was the original idea, but as I worked on the project and learned about agentic AI, the project evolved. The objective of the program became to explore the use of this new and rapidly developing technology (agentic AI) and apply it to mission planning."
Agentic AI is a system design that builds off of LLMs and creates agents that have the ability to conduct multi-step tasks and act autonomously. The ASCEND project applied this novel technology to the mission planning process by prototyping a team of agentic AI agents (built on the smolagents framework) to complete the three steps of generating flight paths. Three agents worked together to execute this task: a manager agent, researcher agent, and mission planner agent. The manager controlled the team and announced when the task was completed, the researcher perused the knowledge base, and the mission planner generated the flight plan itself.
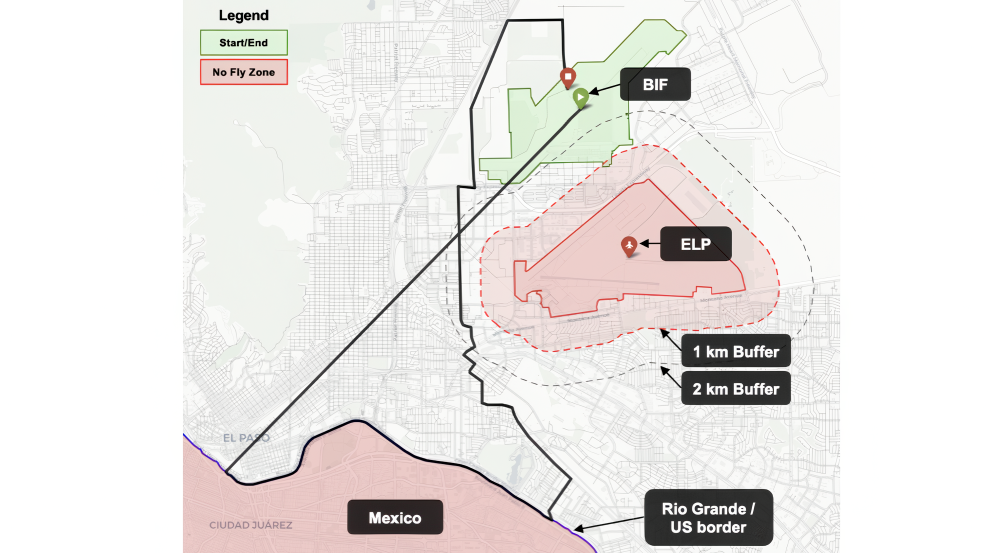
Once the agents were built, the project team tested them with a prompt to design a constraint-compliant, continuous flight path from Biggs Airfield (BIF) in Texas to the Rio Grande River, along the river for seven miles, then back to Biggs Airfield (as shown in the figure above). The agents successfully identified the most direct route while avoiding no-fly zones and adhering to altitude constraints, and generated an updated map with the correct flight plan.
As the ASCEND program showed promise in using agentic AI for drone mission planning, external sponsors expressed interest in the technology. In October 2025, the project team transitioned their work to the FAA-sponsored program GUSTAVE, which is seeking to agentically generate new aircraft routes. The OUSW is also sponsoring an upcoming program as part of their uncrewed systems technology research. Other interested sponsors include the Joint Interagency Task Force 401, the 101st Airborne, and the 75th Ranger Regiment.
While the technology developed in the ASCEND program has been effective in its objective and well received by sponsors, Stabile noted that there are lessons to be learned moving forward.
"The first is the size of the LLM really does matter," said Stabile. "When I was working on ASCEND, I was initially using a small model that is cheap and quick. I could not, for the life of me, get it to work for mission planning. I decided I would pay a little bit more money for a model that is a little slower and more expensive, but it's more capable. There is this trade-off that you have to balance between the capability of a model, the speed, and the cost. The next is, just ask the LLM to do it. You should do this judiciously and not blindly, but over the course of this program, I really started to understand the capability of these LLMs. Lastly, agentic AI is moving extremely fast, and it seems like every week a new model is coming out — a new framework, a new capability — and I think it would be a good idea to investigate how the Laboratory can keep pace with what's going on outside."