
Lincoln Laboratory enters licensing agreement to produce its localizing ground-penetrating radar

MIT has reached agreement with Geophysical Survey Systems, Inc. (GSSI) to develop commercial prototypes of a technology that helps autonomous vehicles navigate by using subsurface geology. Engineers at MIT Lincoln Laboratory, who developed Localizing Ground-Penetrating Radar (LGPR), have demonstrated that features in soil layers, rocks, and road bedding can be used to localize vehicles to centimeter-level accuracy. The LGPR has been used for lane keeping even when snow, fog, or dust obscures aboveground features.
GSSI will build and sell the prototype LGPR systems. While developers of self-driving cars are likely the initial customers, companies providing equipment and services for trucking, construction, mining, and agriculture may also find interest in LGPR capabilities.
"This technology could significantly impact the self-driving vehicle industry," says Byron Stanley, the lead researcher on the LGPR program. "Most autonomous vehicles rely on optical systems that 'see' road surfaces and surrounding infrastructure to localize themselves. Optical systems work well in fair weather conditions, but it is challenging and risky for them to work when snow covers lane markings and road surfaces or fog obscures points of reference. Even in fair conditions, having an independent sensor to rely on when your optics aren't working could add several orders of magnitude to the reliability of current autonomous lane keeping systems. This technology can save lives."
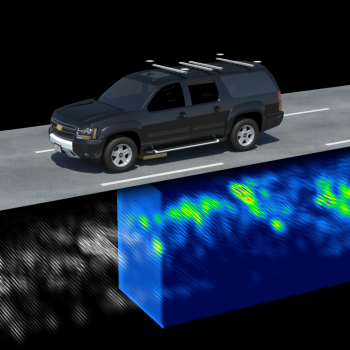
The LGPR sensor uses high-frequency radar reflections of underground features to generate a baseline map of a road's subsurface. The idea is that whenever an LGPR vehicle drives along a road, the data can be used as a reference map. An LGPR vehicle on subsequent passes compares its current map against the reference map. The reference map can be correlated with the current map to create an estimate of the vehicle's location. This localization has been demonstrated to be accurate to within a few centimeters, in real-time and at highway speeds, even at night in snow-storms.
During the 2017 Automated Vehicles Symposium being held between July 11 and 13 in San Francisco, Stanley and David Cist, vice president of R&D at GSSI, showcased the LGPR concept, long-term map stability, and capabilities in a poster session on July 11 and in a "deep dive" discussion session the next afternoon. The annual Automated Vehicles Symposium is the world's largest meeting dedicated to issues in vehicle autonomy. Leading researchers and developers of vehicle automation from industry, government, and academia address the technology innovations, public policy, and human factors affecting progress toward safe vehicle automation.
Stanley and his team are working with GSSI to study the long-term stability of the subterranean maps. Evidence so far shows that the deep subsurface features mapped by LGPR should be relatively immune to aboveground changes that can compromise optical sensors. Assessments of LGPR's accuracy over six- and twelve-month periods show that the maps of primary roads remain valid; less stable are maps of some minor roads whose subsurfaces may be degraded by poor drainage. These results suggest that the underground mapping can be done once, with updates required only for the maps of some less-traveled roads or after road construction. Cist confirms these results from several decades of GPR testing: "For many years, our final validation of all antennas has been to run the same test path over the same road outside our facilities. Although our data show seasonal variability, the results clearly remain stable over decades."
There are several ways that LGPR complements most sensors guiding self-driving vehicles:
- It is robust under conditions that pose difficulties for GPS, lidar, or camera sensors (e.g., in tunnels, canyons, snow, ice, fog, dust, dirt, lighting changes, and dynamic environments).
- The independence of the LGPR to changes to and dynamics of the aboveground environment—where landmarks are torn down or obscured, road markings fade, and signs are moved—provides added assurance of localization.
- Adding stable subsurface mapping reduces the need for continual modifications to highresolution road maps.
Because of its simple design, the LGPR could be mass-produced for $300 or less. As a low-cost addition to sensor suites, LGPR will make autonomous vehicles safer and more capable.