
Autonomous High-Resolution Ocean Floor Mapping

Detailed knowledge of the topography of the seafloor is critically important for many purposes. With a high-resolution bathymetric (i.e., ocean floor depth) map, researchers could better locate undersea resources, such as oil and mineral deposits; track the consequences of man-made activities, such as deep-sea mining; monitor sea life; and model the climate effects of deep-ocean currents. An ocean floor map is also useful for underwater vehicle navigation and for the location of missing objects and wrecks. However, most of the Earth’s oceans remain virtually unmapped and unexplored.
One challenge with seafloor mapping is that no existing technology can produce meter-scale-resolution bathymetry at a large scale (i.e., hundreds of square kilometers per hour). Ocean-mapping ships with modern multibeam echo sounders can survey the seafloor with wide swath coverage but only at a coarse resolution—on the order of 100-meter resolution for a 6,000-meter depth. The resolution limitation arises because only low-frequency sound can make the roundtrip from the sea surface to the seabed; however, low-frequencies are challenging to focus on small spots and require large sonar arrays. Obtaining higher resolution maps in areas 1,000 meters deep or more, which constitute 85% of the ocean, requires deploying an underwater vehicle closer to the seafloor. But this method reduces the coverage rate and adds substantial costs and logistical challenges.
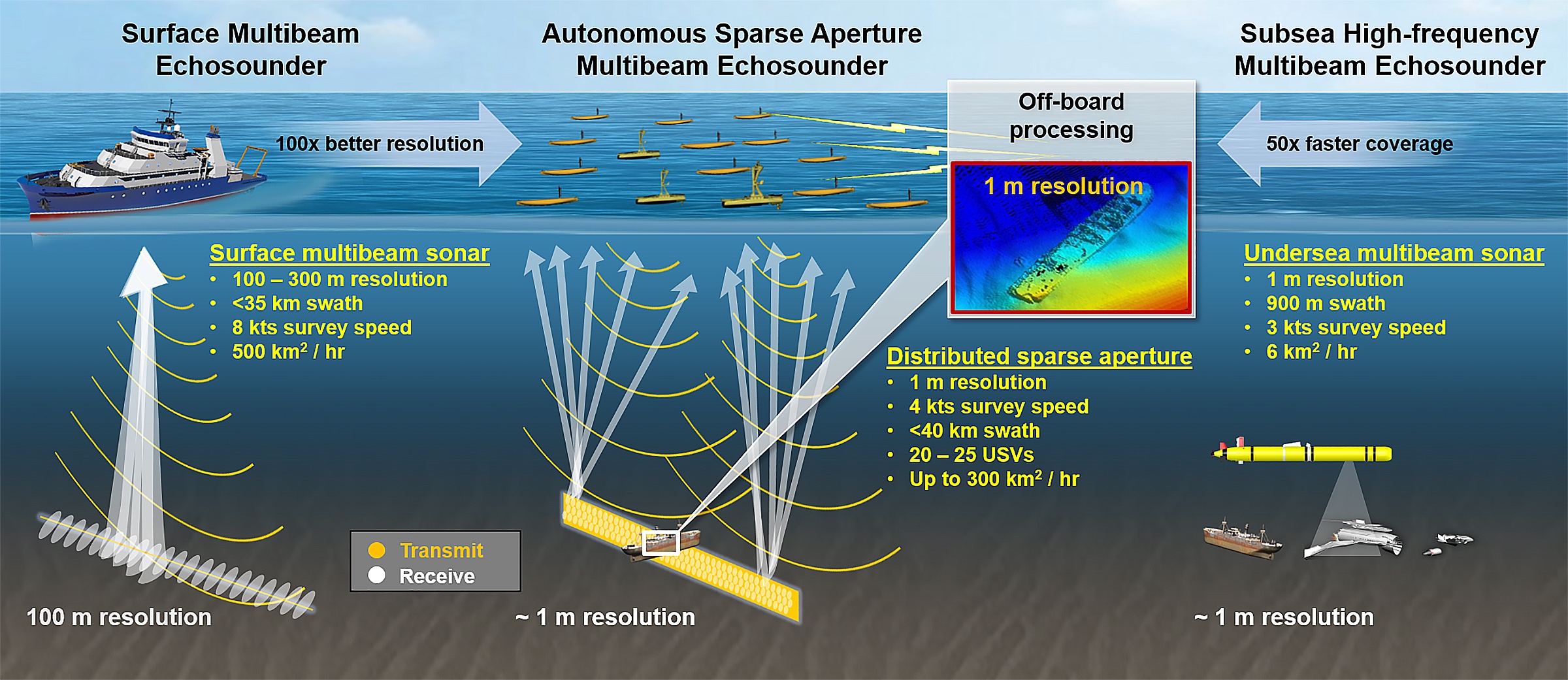
Lincoln Laboratory is testing and developing concepts that could significantly increase the efficiency of collecting high-resolution bathymetric data. Our approach consists of forming a large multiple-input multiple-output (MIMO) sparse aperture sonar array with a fleet of about 20 autonomous surface vessels (ASV). The large effective MIMO aperture achieved by the ASVs enables the synthesis of narrow beams required for high-resolution imaging of the ocean floor from the surface. Laboratory researchers, in collaboration with Pierre Lermusiaux at MIT, are currently developing super-resolution algorithms that estimate detailed bathymetry from sparse sampling of reflected acoustic wavefronts. We are also prototyping a low-cost precision relative navigation system for ASVs to demonstrate these technologies at sea.
Related
News

Human-machine teaming dives underwater


