
Projects
Tagged As
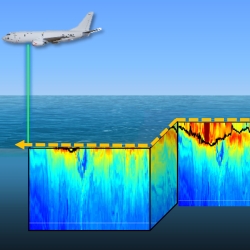
Measuring Subsurface Ocean Properties from the Air
A sensor capable of rapidly collecting high-resolution data on ocean temperature, salinity, and sound speed remotely could improve forecasting for defense missions.
Tags
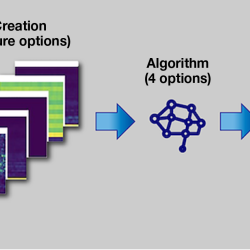
Combining Neural Networks and Histogram Layers for Underwater Target Classification
New machine learning methods capture statistical features within sonar data to distinguish between sound sources.
Tags

Underwater PB&J: Combining Diver and Robot Strengths for Optimized Mid-Mission Teaming
New navigation and vehicle autonomy algorithms consider which tasks humans and autonomous systems respectively do best, with the goal of improving search path planning and object classification in underwater environments.
Tags

Undersea Vision-Based Navigation and Pose Determination for Human-Robot Teaming
Undersea vision-based navigation and pose determination will enable divers and robots to collaboratively solve complex tasks in an inherently unstructured environment.
Tags

Fiber Sensor Array Buoy
A small, low-cost system that leverages long-length fibers embedded with electronics could provide persistent monitoring of the undersea environment.
Tags

Autonomous High-Resolution Ocean Floor Mapping
The Laboratory is working to develop a novel seabed-mapping capability that can achieve high-resolution imaging and a fast coverage rate.
Tags

Undersea Optical Communications
A system that enables robust, long-distance communications between underwater vehicles exploits laser technology.
Tags