
Underwater PB&J: Combining Diver and Robot Strengths for Optimized Mid-Mission Teaming
The U.S. military employs human divers and autonomous underwater vehicles (AUVs) in maritime search and recovery, mine and countermine operations, and warfare. However, fundamental challenges in underwater communication such as the inability of radio signals to propagate in water and the complex refraction of acoustic signals hinder collaboration between divers and AUVs mid-mission. Search paths and plans can only be adjusted based on pre-planned diver or pre-programmed AUV behaviors.
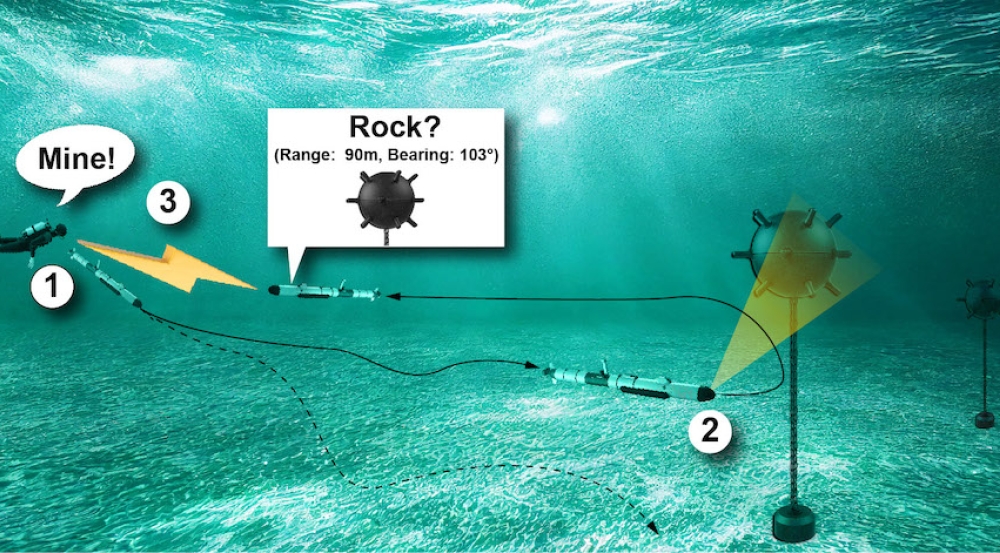
A Lincoln Laboratory team, in collaboration with the Marine Robotics Group of the MIT Computer Science and Artificial Intelligence Laboratory, seeks to maximize diver-AUV communication and teaming during undersea missions. They are developing navigation and vehicle autonomy algorithms to improve search path planning and object classification. These algorithms leverage the complementary strengths of humans and autonomous systems: Humans excel at detecting and classifying objects and making decisions with ambiguous information, whereas AUVs excel at executing complex mathematical operations and interpreting quantitative sensor data about the undersea environment. Combining these strengths requires underwater vehicle autonomy capabilities and robust human-machine translation and handoff algorithms that enable divers to adjust AUV mission control.
The Laboratory team is testing and validating their navigation and autonomy algorithms and the supporting hardware configurations through a generalizable underwater simulator they are developing. This simulator, pyUUVSim (for Python Uncrewed Underwater Vehicle Simulator), models the movement of and communication between entities while representing sensor error and variability in ocean tides, currents, and seafloor topography. Next, they plan to design an autonomy payload, integrate the payload into the Laboratory's Iver3 AUV, validate pyUUVSim predictions through in-water testing, and prototype a diver-AUV handheld communication device. Ultimately, the team will demonstrate a diver-AUV mid-mission collaboration for a harbor entry. Advances made under this program will lead to new capabilities to map and navigate undersea obstacles in coastal and harbor regions for improved military diver safety, survivability, and mission effectiveness.
Related
News

Human-machine teaming dives underwater


