Coordinating Teams of Autonomous Systems
Teams of robots equipped with various capabilities can perform high-risk, undesirable, or repetitive tasks that would otherwise be difficult to accomplish with one platform or several identical platforms. Examples of such tasks include crop maintenance on a high-acreage farm and maritime traffic monitoring in a large harbor with strong currents. However, as robot swarms grow, coordinating them becomes increasingly difficult for human operators.
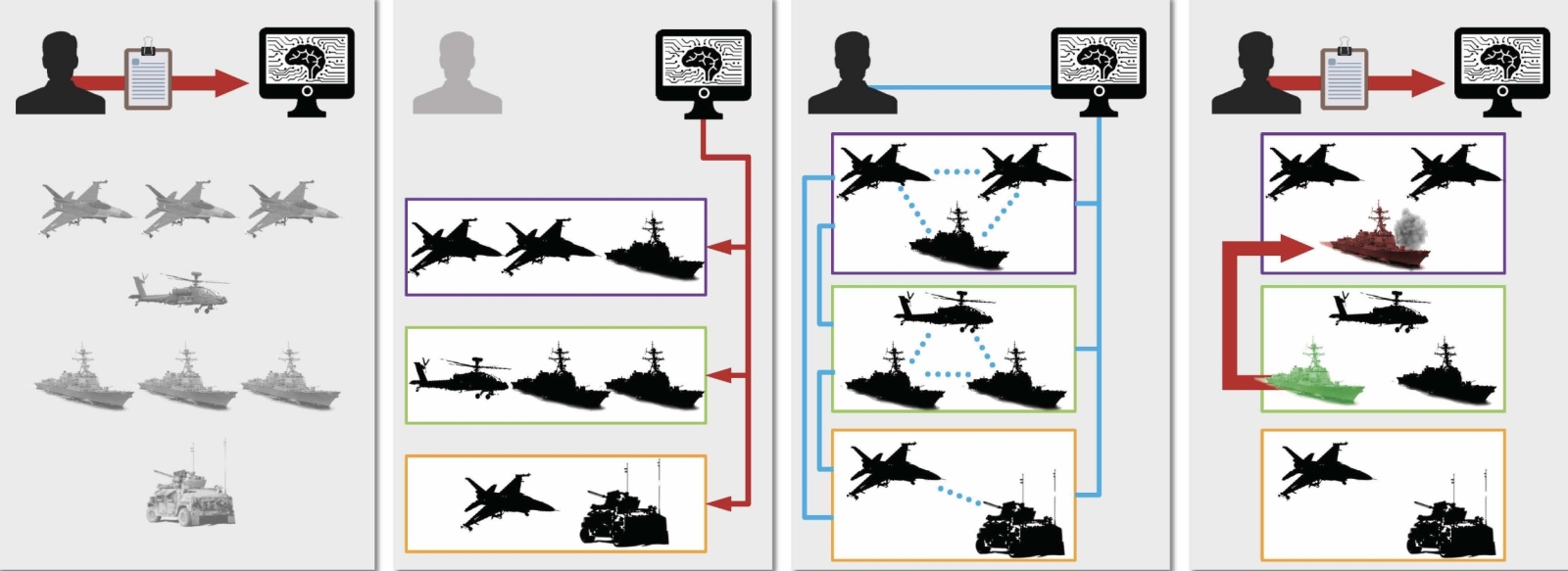
With the Inter- and Intra-team Coordination from High-Level Specification (IITCHS) system, a single operator can input a few basic commands to control multiple autonomous systems simultaneously. This algorithm-based system could improve how autonomous teams are managed for military missions, humanitarian efforts, and industrial operations. For instance, in a disaster-response scenario, IITCHS can deploy a team of drones and ground robots to search through rubble. The operator need only provide a list of tasks or mission objectives and the capabilities required to complete them. IITCHS handles all planning and control activities, down to the level of individual robot commands.
IITCHS employs techniques from an artificial intelligence field known as formal methods. Formal methods verify and validate autonomous systems in a mathematically rigorous way, removing the need for testing at runtime. IITCHS is scalable to large teams (tens to hundreds of robots) with mixed capabilities, including different sensors, effectors (parts of a robot, such as grippers, for interacting with the physical world), and movement dynamics. IITCHS generates mission planning solutions orders-of-magnitude faster than machine learning–based systems. Mission progress is automatically monitored to ensure each robotic platform is operating as expected. As necessary, missions are replanned through feedback mechanisms that are robust to disturbances and resilient against changing mission conditions, including robot failure or malfunction.

To enable simultaneous control of a range of marine robotic platforms, we integrated IITCHS with two software frameworks: Robot Operating System and Mission Oriented Operating Suite – Interval Programming. In collaboration with MIT campus, we deployed IITCHS on multiple autonomous boats in the Charles River in Massachusetts. Next, we plan to deploy a larger heterogenous team of more than 10 unmanned surface vessels and unmanned underwater vehicles on the Charles River to test IITCHS’ capability for mission replanning in response to robot failure.
Related
- IEEE Trans. Robot. paper (2021): "Scalable and Robust Algorithms for Task-Based Coordination from High-Level Specifications (SCRATCHES)"
- Technology Highlight
Related
News