
Helicopter Air Ambulance (HAA) Trajectories, Version 1.
Encounter Models Overview
For many aviation safety studies, aircraft behavior is represented using encounter models, which are statistical models of how aircraft behave during close encounters. They are used to provide a realistic representation of the range of encounter flight dynamics where an aircraft collision avoidance system would be likely to alert. These models represent aircraft behavior (rates) during the course of the encounter with other aircraft. Encounter models have been developed for many different manned operational contexts. For more details on encounter models, please refer to overview on the Airspace Encounter Models GitHub organization: https://github.com/Airspace-Encounter-Models/em-overview.
Helicopter Air Ambulance Encounter Model
As noted in the source, the HAA encounter model was trained using flight operational quality assurance (FOQA) data provided through NDAs by a Massachusetts-based HAA operator. This is the first modern encounter model to solely represent helicopter operations and also the first to train using FOQA data.
This generative Bayesian model was trained from an estimated 2,526,000 observations across 758 flight hours. Approximately 50% of the training data had a reported altitude of 1200 feet mean seal level (MSL) or less and about 50% of the FOQA tracks were 19 minutes or less in duration. The training data was obtained in 2014 through a series of non-disclosure agreements between and MIT Lincoln Laboratory and Panoptes and between Panoptes with a Boston metropolitan HAA company. Panoptes was a spin-off from Aurora Flight Sciences.
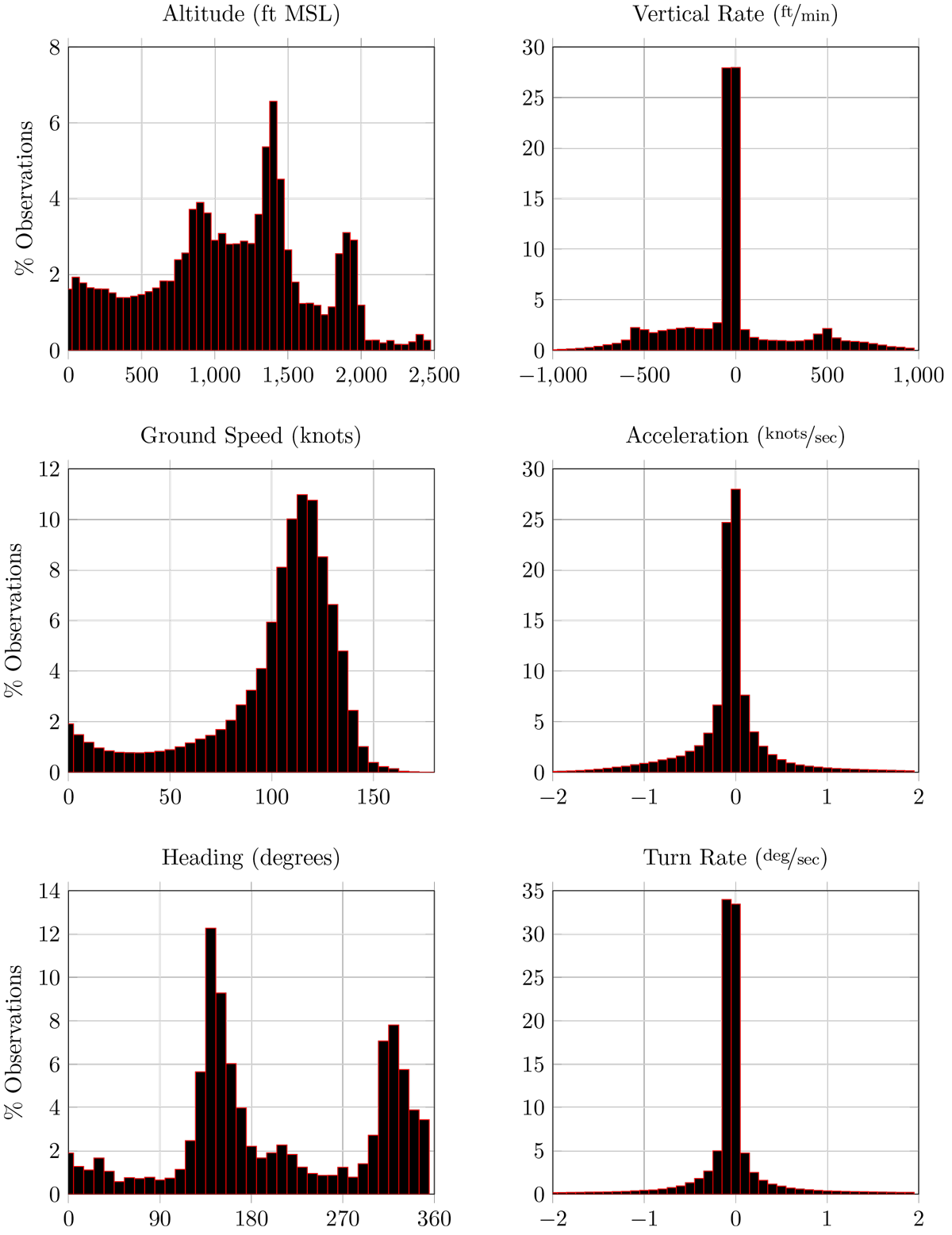
There are nine variables in the HAA encounter model. Similar to all the other encounter models, the airspace is divided in altitude layers. Due to the low operating altitudes and lack of modeled weather (e.g. wind speed is ignored), it is assumed ground speed is equivalent to airspeed. Units are in feet mean sea level (MSL). Similar to the unconventional model, the HAA encounter model does not include an airspace class or a geographical location variable; and similar to the due regard encounter mode, aircraft heading is modeled due to the regular structure of HAA operations.
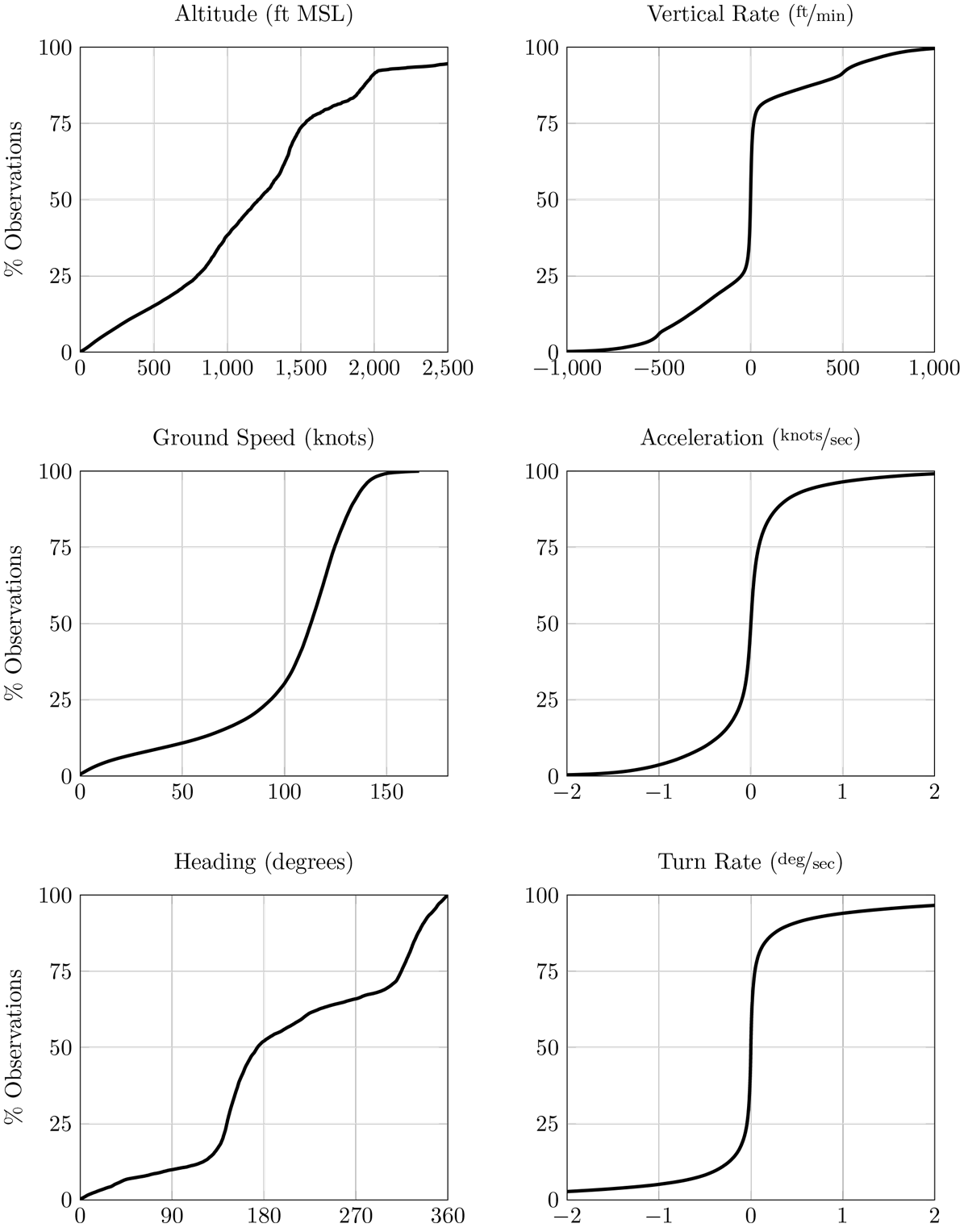
In order to use a discrete Bayesian network, it is necessary to quantize the features by defining a sequence of cut points c1 … cn. Values less than c1 1 are the first bin, values greater than cn are in the (n + 1) bin, and values in the half-open intervals [ci-1,ci) are in the ith bin. None of the variables have a uniform quantization, nor are the bins a constant sized. The bounds and cut points are listed in Table 1. Figure 1 illustrates the independent frequency distribution of some variables in the model and Figure 2 illustrates the empirical CDF for the same variables.
Table 1: HAA variable bound and cut points
|
Variable |
Symbol |
Units |
Quantization |
|
Altitude layer |
L |
feet mean sea level (ft MSL) |
[0; 250; 700; 1500; 5000] |
|
Vertical rate |
h· |
feet per second |
[-25;-20:83;-12:5; 4:17; 4:17; 12:5; 20:83; 25] |
|
Ground speed |
v |
knots |
[0; 30; 60; 90; 120; 140; 200] |
|
Acceleration |
v· |
knots per second |
[-10;-6;-4:5;-1:5; 1:5; 4:5; 6; 10] |
|
Heading |
ψ |
degrees |
[-360;-10;-5; 5; 10; 360] |
|
Turn rate |
ψ· |
degrees per second |
[-8;-1;-:25; :25; 1; 8] |
|
Distance from start |
Do |
feet |
[0; 5000] |
|
Distance to destination |
Di |
feet |
[0; 5000] |
|
Heading from destination |
ψo |
feet |
[-360;-10;-5; 5; 10; 360] |
Sampling the Model
The em-model-manned-bayes repository, as of commit 3d118ccb0cff789dccec835200436f3beadd5d9c, was used to sample the model and generate the trajectories. The model was sampled uniformly. Each trajectory starts at (0,0) feet and is integrated using basic physics equations. On the basis of industry feedback, we also do not provide all outputs from the encounter model, such as lateral acceleration.
This approach uses a basic rejection scheme. Since the model has no sense of terrain or the ground, it is possible to produce a sampled trajectory with a barometric altitude less than zero feet. When generating this dataset, any sampled trajectory with a barometric altitude less than or equal to zero was rejected. All points should have a barometric altitude greater than zero. Trajectories were also rejected if sampled ground speed exceed the maximum ground speed upper bound from Table 1. Additionally, the rejection scheme does not permit negative velocities, such as a helicopter flying backwards. This may be addressed in future software or dataset updates.
Naming Convention
The file naming convention is “HAA_t%i_id%i_alt%i_speed%i.csv,” with parameters delineated by an underscore. All parameters are integers. The filename is designed to make it easy to filter trajectories without loading them into memory.
- BAYES – Prefix denoting file is associated with a Bayesian network encounter model
- t%i – Sampled approximate length of time in seconds
- id%i – Identification number of trajectory and the random number seed used when sampling
- alt%i – Initial altitude in feet mean sea level
- speed%i – Initial ground speed in knots
Recommended Citation
The helicopter air ambulance encounter model referenced in:
A. Weinert, S. Campbell, A. Vela, D. Schuldt, and J. Kurucar, “Well-Clear Recommendation for Small Unmanned Aircraft Systems Based on Unmitigated Collision Risk,” Journal of Air Transportation, vol. 26, no. 3, pp. 113–122, 2018. https://doi.org/10.2514/1.D0091
License

This work is licensed under a Creative Commons Attribution 4.0 International License.
Distribution
This document is derived from work done for the FAA (and possibly others); it is not the direct product of work done for the FAA. The information provided herein may include content supplied by third parties. Although the data and information contained herein has been produced or processed from sources believed to be reliable, the Federal Aviation Administration makes no warranty, expressed or implied, regarding the accuracy, adequacy, completeness, legality, reliability or usefulness of any information, conclusions or recommendations provided herein. Distribution of the information contained herein does not constitute an endorsement or warranty of the data or information provided herein by the Federal Aviation Administration or the U.S. Department of Transportation. Neither the Federal Aviation Administration nor the U.S. Department of Transportation shall be held liable for any improper or incorrect use of the information contained herein and assumes no responsibility for anyone’s use of the information. The Federal Aviation Administration and U.S. Department of Transportation shall not be liable for any claim for any loss, harm, or other damages arising from access to or use of data or information, including without limitation any direct, indirect, incidental, exemplary, special or consequential damages, even if advised of the possibility of such damages. The Federal Aviation Administration shall not be liable to anyone for any decision made or action taken, or not taken, in reliance on the information contained herein.
Download Instructions
The dataset is provided as a single .zip archive with multiple directories. Multiple directories are used to help with computation load balancing and each directory does not have the same quantity of files. The top level directories are numbered one to one hundred. These directories are for load balancing and not dependent upon the sampled encounter model. Within each parent directory, there is a set of directories that correspond to the initial altitude of the sampled track. The track files in a csv format are within these altitude-based directories.
Simply download the .zip file and extract. The size of the .zip file is 1,033,985 KB. The MD5 checksum of the .zip file is: 5dc17e341db0d0b9985cd3417aa33f7d.