
Virtual Test Environments for UAVs
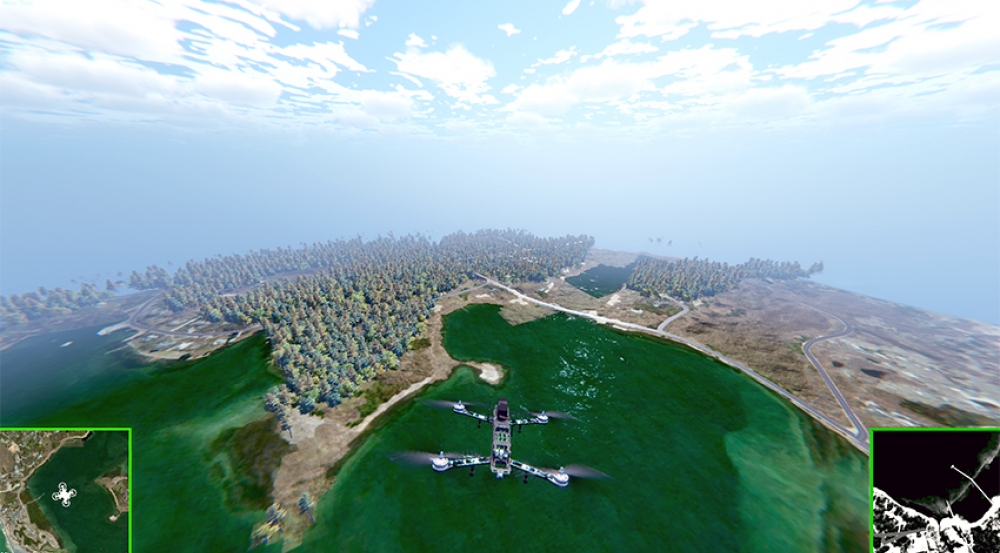
Government and industry see various potential uses for small unmanned aerial vehicles (UAVs). They might be agile partners for search-and-rescue missions in congested urban settings, camera-bearers imaging difficult or hazardous terrain, or cost-effective deliverers of goods. Lincoln Laboratory is at the forefront of UAV R&D, but the recent restrictions on flying UAVs has limited our ability to conduct full-scale flight tests. So we have created a way to test UAV systems without actually flying them in a real-world demonstration. We use virtual environments to mimic the locales in which the UAVs might navigate. By flying a UAV in a safe location, say the Laboratory’s indoor Autonomous Systems Development Facility, but providing the aircraft with a representation of a real environment, we can test if our control, navigational, collision avoidance, or any other algorithms are successfully directing a UAV’s mission. Using simulated sensor data, UAVs can be virtually tested in settings that are either too expensive or too dangerous to use for real-world field tests — for example, a partially demolished building in a search-and-rescue scenario. These virtual environments provide not only a low-cost, low-risk test environment but also offer a practical way to pretrain UAVs to perform tasks.
Related
Events
RAAINS - Recent Advances in AI for National Security 2027
News

Enabling privacy-preserving AI training on everyday devices
