
Radio-Based Navigation for Environments Without GPS
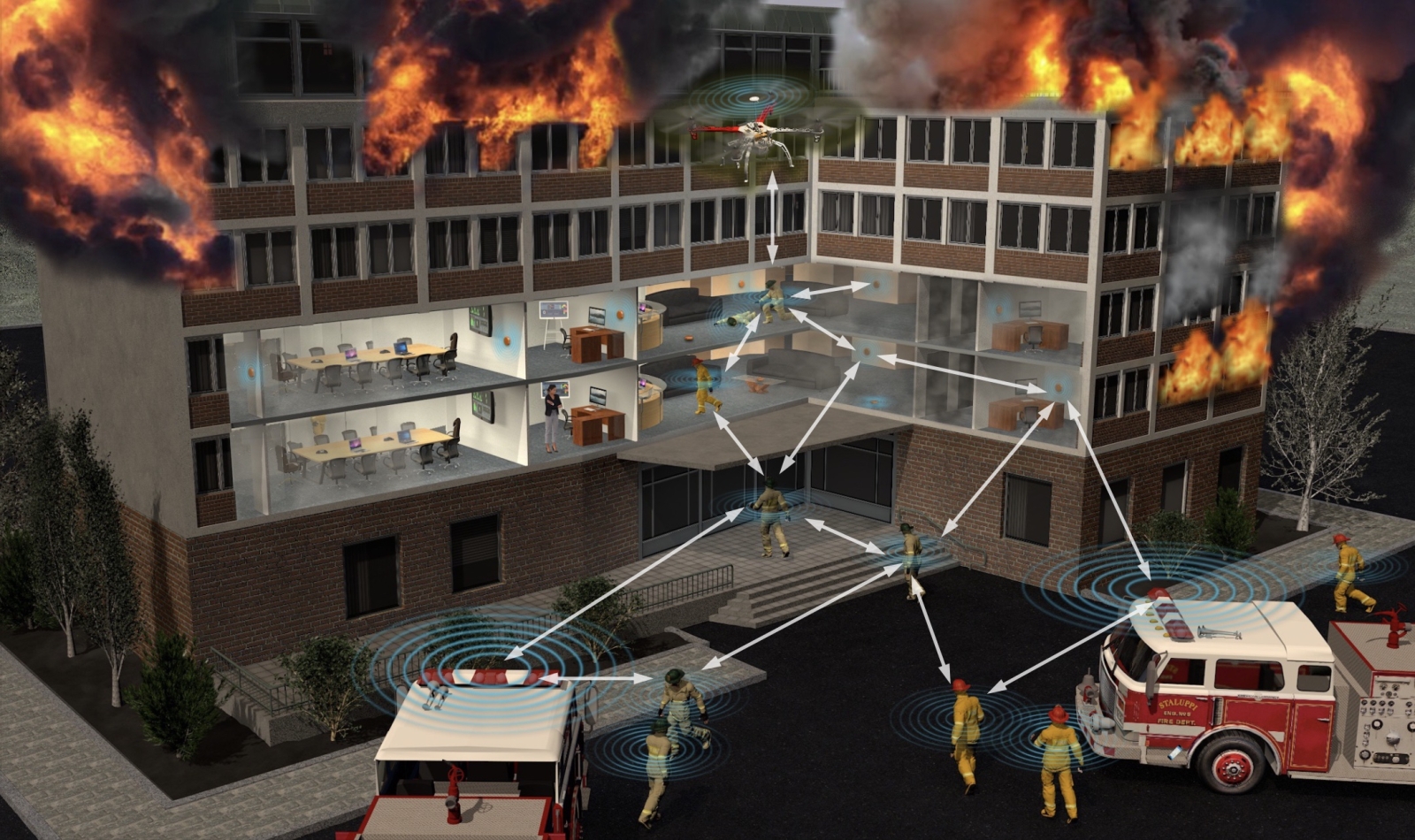
Even in the age of GPS, smartphones, and autonomous systems, many environments continue to challenge our ability to navigate. These environments include indoor, subterranean, undersea, and extraterrestrial locations and conflict zones where GPS may be unavailable. A particularly challenging problem arises when a small team enters such an environment for the first time and must navigate through it without relying on any sort of emplaced infrastructure. One such example is a crew of firefighters searching a complex structure for a downed teammate. Another example is a group of autonomous systems traversing an underground cave. Several sensors and algorithms have been developed to provide location and timing information in these kinds of scenarios, yet none have been able to match the low user cost, accuracy, and widespread availability of GPS.
Rather than depending on a few exquisite sensors, we are exploring approaches that leverage a network of many small, low-power wireless devices relying on radio-frequency signals for navigation and communication. In collaboration with Professor Florian Meyer at UC San Diego, the team is developing the algorithms needed to more effectively share and fuse information across such a dynamic network. We are testing the viability of these algorithms by rapidly prototyping them in a test bed that consists of dozens of small battery-powered radio devices. The Julia programming language enables this rapid transition of new concepts directly into a real-time software ecosystem. If successful, this project may lead to decentralized radio-based navigation solutions in a multitude of environments and missions.
Related
News

Human-machine teaming dives underwater
