
Projects
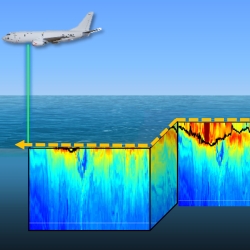
Measuring Subsurface Ocean Properties from the Air
A sensor capable of rapidly collecting high-resolution data on ocean temperature, salinity, and sound speed remotely could improve forecasting for defense missions.
Tags

KREMS Technology Rearchitecting
A complete rearchitecting of radar backends will enable the missile and space missions on Kwajalein for decades to come.
Tags

Wind Turbine Interference–Mitigation Study
A strategy for lessening wind turbines’ effects on the performance of an aircraft measurement system at a naval air station on the Chesapeake Bay could inform future research into interference mitigation for other radar applications.
Tags

Dual-Use Waveforms for Radar Detection and Wireless Communication
New waveforms enable efficient spectrum sharing between radars sensing moving objects and wireless communications systems transmitting data.
Tags
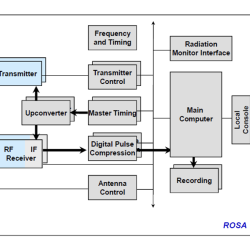
Kwajalein Modernization and Remoting Program Radar Open System Architecture
We developed an open system architecture that reduces the complexity and cost of operations at the Reagan Test Range.
Tags

Reagan Test Range Automation and Decision Support
New software tools provide test operators with automated decision support for directing sensors during increasingly complex tests conducted at the Reagan Test Range (RTR).
Tags

Reagan Test Range Distributed Operations
We contributed to a transformational program to fundamentally change the mission execution and operations at the Reagan Test Range.
Tags

Reagan Test Range Optics Modernization
Upgrades to the Reagan Test Range’s optical systems combine state-of-the-art focal plane technologies with a wide-area, network-centric, open-system design to allow distributed system command and control while achieving unprecedented metric accuracy.
Tags
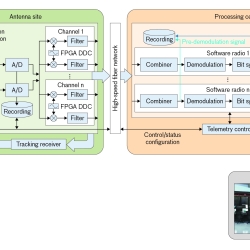
Telemetry Modernization with Open-Architecture Software-Defined Radio Technology
We conducted a software-defined radio technology development program to improve the way telemetered information is collected and processed.
Tags
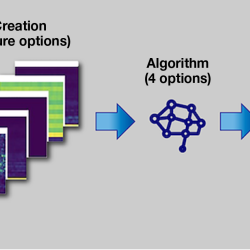
Combining Neural Networks and Histogram Layers for Underwater Target Classification
New machine learning methods capture statistical features within sonar data to distinguish between sound sources.
Tags